14.GoogLeNet、批量规范化、ResNet、DenseNet.md
内容概述:
- GoogLeNet
- 批量规范化
- ResNet
- DenseNet
14.1 GoogLeNet(含并行连结的网络)
14.1.1Inception块(核心组件)
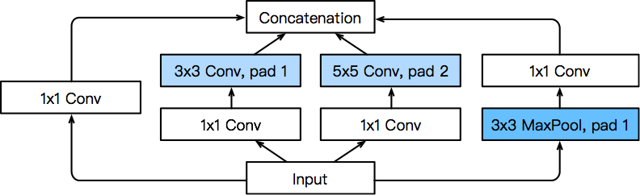
Inception块是GoogLeNet的核心创新,通过四条并行路径提取不同尺度的特征,兼顾特征多样性和计算效率:
-
路径设计:
-
路径1:1×1卷积层(直接提取小尺度特征,减少计算量);
-
路径2:1×1卷积层 → 3×3卷积层(先降维再提取中等尺度特征);
-
路径3:1×1卷积层 → 5×5卷积层(先降维再提取大尺度特征);
-
路径4:3×3最大池化 → 1×1卷积层(保留空间结构,同时调整通道数)。
-
-
关键技巧:
-
所有路径通过填充保证输出高/宽与输入一致;
-
最终在通道维度拼接四条路径的输出;
-
1×1卷积的核心作用:降维(减少后续卷积的计算量)、跨通道信息融合。
-
14.1.2GoogLeNet整体架构
-
结构特点:
-
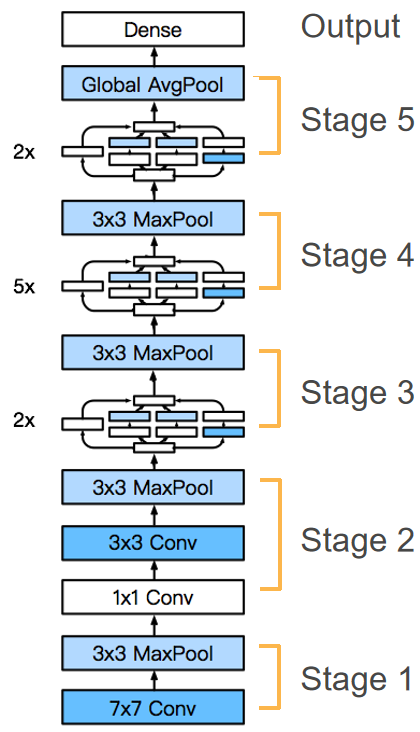
由9个Inception块 + 卷积层/池化层串联组成;
-
用最大池化层降低特征图维度(替代全连接层的降维作用);
-
最后使用全局平均池化层(AdaptiveAvgPool2d((1,1)))将每个通道压缩为1×1,避免全连接层的大量参数;
-
仅在最后接一个简单的全连接层输出分类结果(如Fashion-MNIST的10类)。
-
-
维度变化(以96×96输入为例):
输入(1,1,96,96) → 经多轮Inception块/池化层 → 输出(1,1024) → 全连接层→(1,10)。
14.1.3GoogLeNet的核心优势
-
多尺度特征融合:不同大小的卷积核(1×1/3×3/5×5)捕捉不同范围的图像细节,提升特征表达能力;
-
高效计算:通过1×1卷积降维,在增加特征维度的同时控制整体计算复杂度(比VGG参数更少);
-
避免过拟合:全局平均池化替代全连接层,减少参数数量,降低过拟合风险。
14.1.4训练注意事项
-
输入尺寸:原论文用224×224,为简化训练(如Fashion-MNIST)可缩放到96×96;
-
梯度稳定:早期版本需添加“辅助分类器”稳定训练,现代优化器(如SGD/Adam)可省略;
-
常见问题:训练中出现
loss nan通常是学习率过高(可调低lr,如0.01)或梯度爆炸,需配合梯度裁剪/批量归一化。
14.1.5关键点回顾
-
Inception块通过4条并行路径实现多尺度特征提取,1×1卷积是降维提效的核心;
-
GoogLeNet用全局平均池化替代全连接层,大幅减少参数和计算量;
-
整体思路:融合多尺度特征 + 高效计算设计,在精度和效率间取得平衡。
14.2 批量规范化
14.2.1批量规范化的核心目标
解决深层神经网络训练的三大痛点:
-
数据分布偏移:训练过程中中间层的输入分布随参数更新不断变化(内部协变量偏移),导致模型收敛慢、学习率难以调整;
-
梯度不稳定:深层网络中,靠前层的微小参数变化会被放大,导致梯度爆炸/消失;
-
正则化需求:辅助降低过拟合风险(小批量统计带来的噪声相当于弱正则化)。
14.2.2批量规范化的核心原理
- 核心公式:
对小批量数据 \(X\) 做标准化,再通过可学习的拉伸( \(\gamma\) )和偏移( \(\beta\) )参数恢复表达能力:
\(Y = \gamma \cdot \frac{X - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}} + \beta\)
-
\(\mu_B\) :小批量均值, \(\sigma_B^2\) :小批量方差(加 \(\epsilon\) 避免除零);
-
\(\gamma\) (初始1)、 \(\beta\) (初始0):与模型参数一起训练,让网络自主决定是否保留标准化后的分布。
-
训练/预测模式差异:
| 模式 | 均值/方差来源 | 目的 |
|---|---|---|
| 训练 | 当前小批量的统计值 | 利用批量噪声做弱正则化 |
| 预测 | 训练过程中累积的移动平均 | 保证预测结果稳定 |
-
不同层的适配:
-
全连接层:对特征维度(dim=0)计算均值/方差;
-
卷积层:对通道维度(dim=1)计算均值/方差(所有空间位置共享同一套统计值)。
-
14.2.3批量规范化的实现要点
-
手动实现逻辑:
-
区分训练/预测模式(通过
torch.is_grad_enabled()); -
维护移动均值/方差(
moving_mean/moving_var),用momentum平滑更新; -
适配全连接(2维)/卷积(4维)输入的维度计算。
-
-
框架原生API:
-
全连接层:
nn.BatchNorm1d(num_features); -
卷积层:
nn.BatchNorm2d(num_channels); -
无需手动维护移动均值/方差,框架自动处理。
-
-
使用位置:
通常放在卷积/全连接层之后、激活函数之前(如 LeNet 中:Conv → BatchNorm → Sigmoid)。
14.2.4批量规范化的实践价值
-
加速收敛:允许使用更大的学习率(如示例中 lr=1.0),训练速度提升显著;
-
稳定训练:降低对初始化、学习率的敏感度,更容易训练深层网络(如ResNet);
-
弱正则化:小批量统计的噪声减少过拟合(但不能替代Dropout/权重衰减);
-
争议点:原论文提出的“减少内部协变量偏移”并非核心原因,其有效性更多来自梯度稳定和正则化作用。
14.2.5关键注意事项
-
批量大小:小批量过小时(如batch_size=1),均值/方差无意义,批量规范化失效;
-
推理阶段:必须使用训练时累积的移动均值/方差(框架自动切换,无需手动干预);
-
参数初始化: \(\gamma\) 初始为1、 \(\beta\) 初始为0,保证初始状态等价于“无批量规范化”。
14.2.6关键点回顾
-
批量规范化通过标准化小批量数据稳定中间层分布,加速深层网络收敛;
-
训练/预测模式使用不同的均值/方差来源,框架API已封装该逻辑;
-
核心价值是梯度稳定+弱正则化,“内部协变量偏移”并非其有效核心解释。
14.3 残差网络
14.3.1ResNet的核心动机
解决深层网络训练退化问题:
-
传统深层网络(如VGG)层数增加到一定程度后,训练误差和测试误差反而上升(并非过拟合,而是梯度消失/爆炸导致无法有效学习);
-
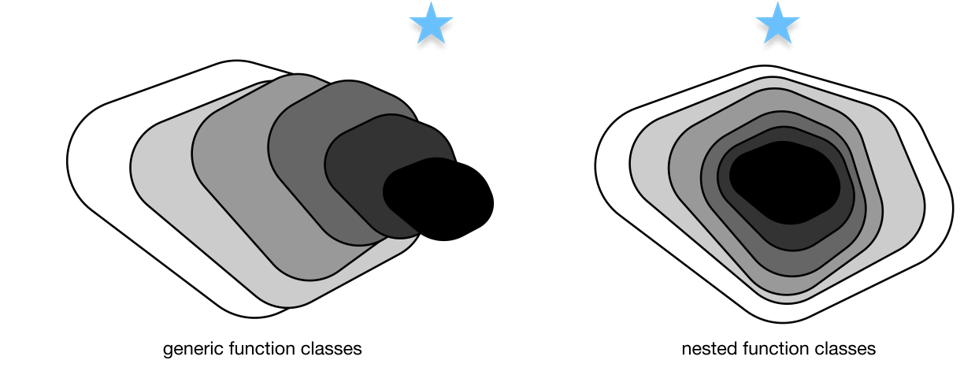
核心假设:如果能让新增层轻松拟合恒等映射( \(f(x)=x\) ),那么深层网络的性能至少不低于浅层网络,甚至更好;
-
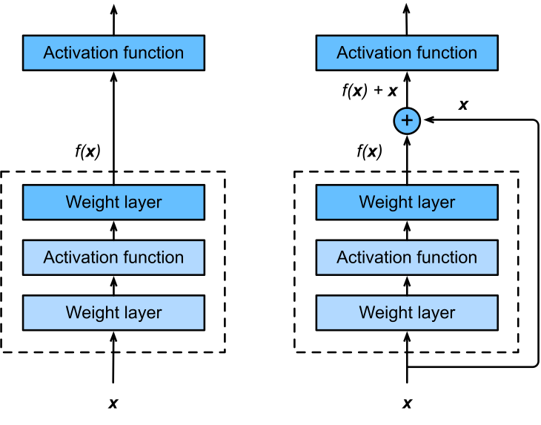
实现思路:将“直接拟合目标映射 \(f(x)\) ”转为“拟合残差映射 \(f(x)-x\) ”(残差),当目标映射接近恒等映射时,残差映射只需拟合接近0的函数,更容易优化。
14.3.2残差块(Residual Block)—— ResNet的核心组件
-
结构设计:
-
基础版:2个3×3卷积层(同通道数、同分辨率) + 批量规范化 + ReLU,输入通过跨层捷径连接(shortcut) 直接加到第二个卷积层的输出上,最后接ReLU;
-
扩展版(调整通道/分辨率):当需要改变输出通道数或减半分辨率时,捷径连接中加入1×1卷积层(调整输入的通道数和步幅),保证输入与卷积输出形状匹配以完成相加。
-
-
关键代码逻辑:
-
形状适配规则:
-
同形状:直接相加(use_1x1conv=False,strides=1);
-
升通道+降分辨率:1×1卷积调整输入(use_1x1conv=True,strides=2)。
-
14.3.3ResNet整体架构(以ResNet-18为例)
- 分层设计:
| 模块 | 结构 | 输出形状变化(输入224×224) |
|---|---|---|
| b1 | 7×7卷积(64通道,stride=2)+ BN + ReLU + 3×3最大池化(stride=2) | 224×224 → 56×56(64通道) |
| b2-b5 | 4个残差块模块(每个模块2个残差块) | b2:56×56(64)→ b3:28×28(128)→ b4:14×14(256)→ b5:7×7(512) |
| 输出层 | 全局平均池化 + Flatten + 全连接层(10类) | 7×7×512 → 512 → 10 |
| 2. 核心特点: |
- 分辨率逐层减半,通道数逐层翻倍(64→128→256→512);
- 所有卷积层后均接批量规范化,提升训练稳定性;
- 无全连接层(除最后输出),用全局平均池化减少参数,避免过拟合。
14.3.4ResNet的核心优势
-
解决梯度消失/爆炸:捷径连接为梯度提供“直通路”,梯度可直接从输出层传递到浅层,避免深层梯度趋近于0;
-
嵌套函数学习:保证深层网络至少能复现浅层网络的性能(只需让新增残差块拟合恒等映射),层数增加不会导致性能退化;
-
架构简洁:相比GoogLeNet的Inception块,残差块设计更简单,易于扩展(如ResNet-50/101/152仅需调整残差块内的卷积结构)。
14.3.5实践注意事项
-
批量规范化:残差块中卷积层后必须接BN,否则训练稳定性大幅下降;
-
捷径连接的形状匹配:必须保证相加的两个张量形状完全一致(通道数、高、宽);
-
数据集适配:训练时需将输入resize到合适尺寸(如Fashion-MNIST resize到96×96,ImageNet用224×224)。
14.3.6关键点回顾
-
ResNet通过残差映射替代直接映射,解决深层网络训练退化问题,核心是“拟合残差 \(f(x)-x\) 比拟合 \(f(x)\) 更容易”;
-
残差块的跨层捷径连接是核心设计,既可以直接连接(同形状),也可通过1×1卷积调整形状(升通道/降分辨率);
-
ResNet架构遵循“分辨率减半、通道数翻倍”的规律,结合批量规范化和全局平均池化,成为深层网络设计的经典范式。
14.4 DenseNet
14.4.1稠密连接网络(DenseNet)
14.4.1.1核心思想:从ResNet到DenseNet的进化
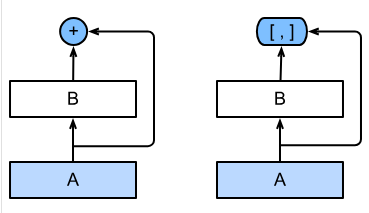
ResNet的核心是“残差连接”:将输入和输出相加(恒等映射 + 残差),公式为 \(H(x) = x + F(x)\) ,本质是把函数分解为“简单线性项 + 复杂非线性项”;
DenseNet则进一步,将每一层的输入与前面所有层的输出在通道维度拼接(concat),核心公式为:
\(x_l = H_l([x_0, x_1, ..., x_{l-1}])\)
其中 \([x_0, x_1, ..., x_{l-1}]\) 表示前面所有层的特征图在通道维度拼接,这种“每层都与之前所有层连接”的方式就是“稠密连接”,能更充分地复用特征。
14.4.1.2 DenseNet的两大核心组件
1. 稠密块(DenseBlock)
-
作用:实现核心的稠密连接,是DenseNet的特征提取单元;
-
结构:由多个“BN → ReLU → 3×3卷积”的卷积块组成;
-
关键细节:
-
每个卷积块的输入通道数 = 初始输入通道数 + 前面所有卷积块的输出通道数之和;
-
增长率(growth rate):每个卷积块的输出通道数(代码中
num_channels),控制通道数的增长速度(比如增长率为32,4个卷积块的稠密块会增加128个通道)。
-
代码核心逻辑:
def forward(self, X):
for blk in self.net:
Y = blk(X)
# 通道维度拼接:当前输入X + 卷积块输出Y
X = torch.cat((X, Y), dim=1)
return X
2. 过渡层(Transition Block)
-
作用:解决稠密块导致的通道数持续膨胀问题,控制模型复杂度;
-
结构:BN → ReLU → 1×1卷积(降通道) → 2×2平均池化(降高/宽,步幅2);
-
关键细节:
-
1×1卷积:将通道数减半(代码中
num_channels // 2),减少计算量; -
平均池化:将特征图的高和宽减半,进一步降低模型规模。
-
14.4.1.3 DenseNet完整模型结构
DenseNet的整体结构与ResNet类似,但用“稠密块+过渡层”替代了残差块,具体流程:
-
初始层:7×7卷积(步幅2)→ BN → ReLU → 3×3最大池化(步幅2)(与ResNet一致);
-
主体层:4个稠密块,块之间插入过渡层(最后一个稠密块后无过渡层);
-
输出层:BN → ReLU → 全局自适应平均池化(将特征图转为1×1) → Flatten → 全连接层(分类)。
核心流程示例(代码):
# 初始层
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
# 4个稠密块+过渡层(最后一个块无过渡层)
num_channels, growth_rate = 64, 32 # 初始通道64,增长率32
num_convs_in_dense_blocks = [4, 4, 4, 4] # 每个稠密块4个卷积块
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
num_channels += num_convs * growth_rate # 更新通道数
if i != 3: # 前3个稠密块后加过渡层
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
# 输出层
net = nn.Sequential(
b1, *blks,
nn.BatchNorm2d(num_channels), nn.ReLU(),
nn.AdaptiveAvgPool2d((1, 1)), # 全局池化
nn.Flatten(),
nn.Linear(num_channels, 10)) # 分类头
14.4.1.4 训练要点
-
为简化计算,通常将输入图片尺寸从224×224降到96×96;
-
优化器常用SGD,学习率初始设为0.1,训练过程中可按需衰减;
-
由于特征复用充分,DenseNet在小数据集(如Fashion-MNIST)上也能取得较好效果(测试准确率约88%+)。
14.4.1.5 总结
-
核心连接方式:DenseNet与ResNet的核心区别是“通道拼接”而非“特征相加”,实现每层与前面所有层的稠密连接,充分复用特征;
-
关键组件:稠密块实现特征复用(增长率控制通道增长),过渡层通过1×1卷积和平均池化控制模型复杂度(降通道、降尺寸);
-
模型结构:初始层+4个稠密块(块间过渡层)+全局池化+全连接层,整体结构简洁且特征利用效率高。
14.5 总结
- GoogLeNet通过Inception块实现多尺度特征融合,采用全局平均池化减少参数,提升效率;
- DenseNet通过“稠密连接”实现特征复用,有效解决了梯度消失问题,在小数据集上也能取得较好效果。
- ResNet通过“残差连接”解决深层网络训练退化问题,核心是让新增层拟合残差映射,保证性能不退化。
- DenseNet的“稠密连接”机制使得特征复用更充分,模型规模更小,同时保持了较高的分类准确率。